





服務(wù)熱線
0769-28680919
153-2293-3971

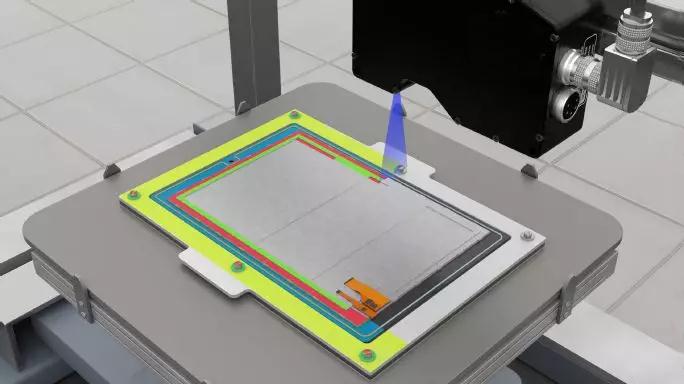
機器人機器視覺系統(tǒng)是一種技術(shù),它使機器人能夠通過圖像處理和識別技術(shù)來感知和理解其周圍環(huán)境,進而實現(xiàn)智能操作。機器視覺是機器人感知能力的重要組成部分,使得機器人能夠像人一樣通過視覺來獲取信息,理解并處理環(huán)境。
機器人機器視覺系統(tǒng)主要涉及到兩個核心技術(shù):
動態(tài)圖像社區(qū)與場景跟蹤技術(shù):這項技術(shù)主要涉及到如何確定攝像機的位置和朝向,以便能夠獲取到清晰、準確的圖像。此外,還包括如何對場景進行追蹤、評定,以及判斷產(chǎn)品是否合格等。在這個過程中,攝像機的參數(shù)標定和在線自動適應(yīng)控制都是非常重要的環(huán)節(jié)。
場景和目標的視覺感知和準確測量技術(shù):這項技術(shù)主要涉及到如何從作業(yè)區(qū)域中提取和感知作業(yè)目標的視覺特征,以及如何準確測量和跟蹤這些目標。通過這項技術(shù),機器人可以獲取到產(chǎn)品的各種特征,形成三維形狀數(shù)據(jù),并與標準值進行對比,從而判斷產(chǎn)品的質(zhì)量和是否符合要求。
實現(xiàn)機器人機器視覺技術(shù)的過程中,主要涉及到以下視覺信息處理算法:
圖像采集:這是機器視覺系統(tǒng)的第一步,主要是通過各種傳感器獲取到原始的圖像數(shù)據(jù)。
圖像預(yù)處理:主要是對原始圖像進行一些預(yù)處理操作,如去噪、增強等,以便提高后續(xù)處理的準確性和效率。
圖像目標分割:主要是從預(yù)處理后的圖像中分割出感興趣的目標區(qū)域,以便進行后續(xù)的識別和處理。
特征提取:主要是從分割出的目標區(qū)域中提取出各種特征,如形狀、顏色、紋理等,以便進行后續(xù)的識別和分類。
三維恢復:主要是通過一些算法和技術(shù),將二維的圖像數(shù)據(jù)恢復成三維的形狀數(shù)據(jù),以便進行更準確的測量和識別。
通過這些算法和技術(shù)的組合和應(yīng)用,機器人機器視覺系統(tǒng)可以實現(xiàn)對環(huán)境的感知和理解,從而實現(xiàn)智能操作。
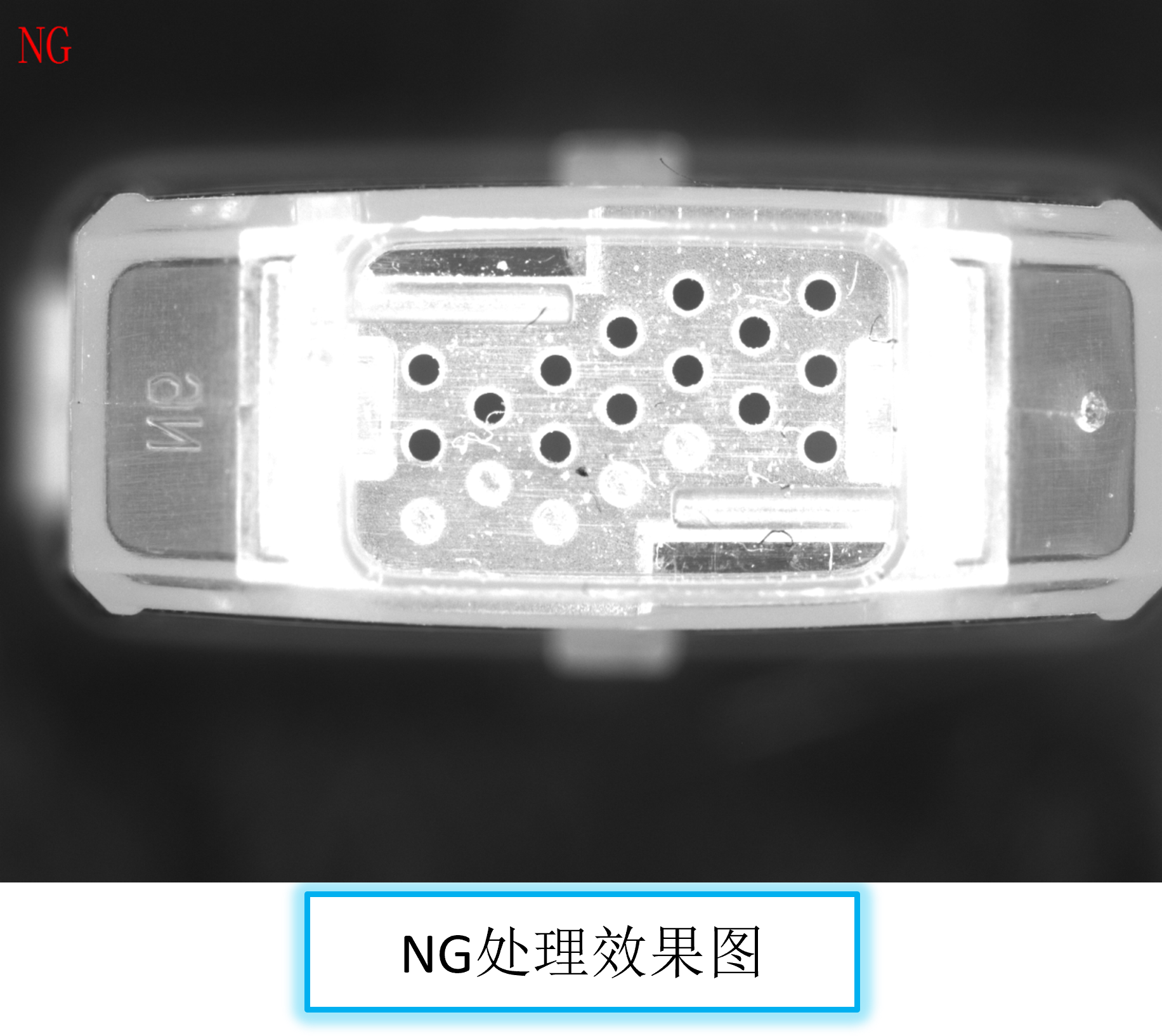
 康耐德智能芯片流道臟污視覺檢測設(shè)備
2024-12-28
康耐德智能芯片流道臟污視覺檢測設(shè)備
2024-12-28
在半導體芯片制造過程中,由于各種因素導致的芯片表面或內(nèi)部通道形成芯片流道臟污。這些污染可能包括但不限于:
 康耐德智能晶圓半導體semi字符視覺識別系統(tǒng)
2024-12-28
康耐德智能晶圓半導體semi字符視覺識別系統(tǒng)
2024-12-28
在半導體行業(yè)中,晶圓在進行工藝前后會進行字符的視覺檢測,用于產(chǎn)品信息入庫記錄標識,但與傳統(tǒng)方式產(chǎn)生的油墨、單點字符不一樣,雕刻的字符采用的是半導體行業(yè)專用的Semidouble-雙密度點陣特殊字體,使用傳統(tǒng)視覺方式進行定位及識別穩(wěn)定性較差,很容易出現(xiàn)字符識別錯誤及漏檢。
 機器視覺檢測孔位缺陷及計數(shù)
2024-12-27
機器視覺檢測孔位缺陷及計數(shù)
2024-12-27
機器視覺檢測孔位缺陷及計數(shù)
 3D相機對小型零件視覺檢測效果如何?
2024-12-22
3D相機對小型零件視覺檢測效果如何?
2024-12-22
3D相機在小型零件檢測中的效果是非常顯著的,具體優(yōu)勢如下:
 官方公眾號
官方公眾號 官方抖音號
官方抖音號Copyright ? 2022 東莞康耐德智能控制有限公司版權(quán)所有.機器視覺系統(tǒng) 粵ICP備2022020204號-1 聯(lián)系我們 | 網(wǎng)站地圖
