





服務熱線
0769-28680919
153-2293-3971

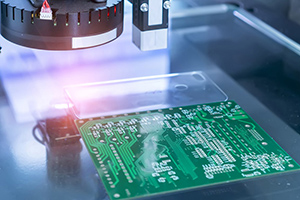
CCD視覺定位系統是一種基于攝像頭成像原理實現的定位系統。該系統通過攝像頭采集圖像,并利用圖像處理技術,對采集到的圖像進行處理,從而實現定位。下面我們將介紹CCD視覺定位系統實現定位的原理。
CCD視覺定位系統的圖像采集主要由攝像頭完成。攝像頭通過光學鏡頭將實際場景成像在CCD感光元件上,然后通過AD轉換將模擬信號轉換為數字信號,以便后續處理。在采集圖像前,需要對攝像頭進行標定,以消除鏡頭畸變和徑向失真等影響。
CCD視覺定位系統中的定位算法主要包括圖像預處理、特征提取和匹配等步驟。
其中,圖像預處理包括噪聲去除、對比度增強等操作;
特征提取包括邊緣檢測、角點提取等操作;
匹配則是將提取出的特征與目標物體進行匹配,從而確定目標物體的位置。
CCD視覺定位系統在實際應用中具有廣泛的應用,如機器人導航、自動化生產線上的物體識別等。

在點膠領域,康耐德智能研發針對點膠機的定位、引導、檢測于一體的2D/3D定位引導點膠AOI系統,通過對應的傳感器獲取產品的數據,能夠給出每個點位精準的空間坐標信息從而引導點膠設備進行準確的涂膠,同時還可以進行點膠后質量檢測。
通過利用CCD視覺定位系統,可以實現高精度、高效率的定位和檢測,從而提高生產效率和產品質量。
 DeepSeek哪些特點可以地應用到工業視覺檢測?
2025-04-05
DeepSeek哪些特點可以地應用到工業視覺檢測?
2025-04-05
工業視覺檢測是利用計算機視覺技術對工業產品進行外觀檢測、缺陷識別、尺寸測量等任務的領域
 康耐德AOI檢測系統:機器視覺下的高效角度測量技術
2025-04-05
康耐德AOI檢測系統:機器視覺下的高效角度測量技術
2025-04-05
康耐德機器視覺AOI檢測系統在角度測量方面的功能主要體現在以下幾個方面:
 康耐德智能顯示模組側邊封膠AOI系統
2025-04-05
康耐德智能顯示模組側邊封膠AOI系統
2025-04-05
康耐德智能顯示模組側邊封膠AOI系統是一種專門用于檢測顯示模組側邊封膠質量的自動化光學檢測系統。
 焊接機器人如何通過3D視覺數據自適應調整?
2025-03-22
焊接機器人如何通過3D視覺數據自適應調整?
2025-03-22
焊接機器人能夠根據3D視覺數據進行自適應調整,提高焊接精度和效率,降低對工件特征和編程的要求,實現更智能化和自動化的焊接生產。
 官方公眾號
官方公眾號 官方抖音號
官方抖音號Copyright ? 2022 東莞康耐德智能控制有限公司版權所有.機器視覺系統 粵ICP備2022020204號-1 聯系我們 | 網站地圖
